Связи и их классификация.
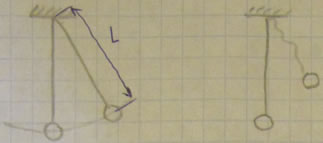
Связь называется удерживающей (двухсторонней), если она описывается уравнением (равенством). Голономную стационарную удерживающую связь, наложенную на материальную точку, можно представить в виде двух бесконечно близких одинаковых поверхностей, между которыми только и может находиться точка. Неудерживающая (односторонняя) связь описывается неравенством. Например, если математический маятник представляет собой тонкий стержень длиной l, вращающийся вокруг неподвижной оси и к свободному концу которого прикреплен груз (материальная точка), то связь для груза будет удерживающая. Если же груз прикреплен к свободному концу нерастяжимой нити длиной l. то связь будет неудерживающая, поскольку груз может находиться как на поверхности сферы радиусом l, так и внутри нее.
Механическая система, точки которой могут занимать любое положение в пространстве и иметь любые скорости, называется свободной. Например, свободной системой является космический аппарат, движущийся по орбите вокруг Земли. Его движение не ограничено другими телами и поэтому, прикладывая к аппарату соответствующие силы, можно изменять траекторию его центра масс и поворачивать аппарат вокруг центра масс. Если на координаты и скорости точек системы наложены ограничения, то система называется несвободной, а ограничения называются связями. Механические связи реализуются в виде различных устройств или тел (стержни, нити, шарниры и т. п.). Аналитически связь описывается уравнением вида: ![]() .
.
Ограничивая движение механической системы, связи действуют на ее точки посредством сил, которые называются реакциями
связей. При изучении равновесия и движения механических систем методами аналитической механики применяется принцип
освобождения (аксиома о связях). Этот принцип состоит в том, что любую систему можно рассматривать как свободную, приложив к ее точкам реакции, соответствующие отброшенным связям.
Связи называются галономными, если они описываются уравнениями вида: ![]()
Такие связи накладывают ограничения на координаты точек, а значит, на положение системы в пространстве. Это так называемые геометрические связи. Вместе с тем голономные связи накладывают ограничения и на скорости точек системы. Соответствующие условия получаются в результате дифференцирования уравнений (18.1) по времени:
![]()
Голономные связи могут описываться и дифференциальными уравнениями, однако последние обязательно должны быть интегрируемыми.
Неголономными называются связи, которые описываются уравнениями вида:
![]()
Уравнения (18.2), в отличие от уравнений голономных связей, не могут быть проинтегрированы независимо от дифференциальных уравнений движения системы. Неголономные связи накладывают ограничения (18.2) на скорости точек, поэтому их называют кинематическими.
Связи подразделяются на стационарные и нестационарные в зависимости от того, входит в явном виде время в уравнение связи или нет. Связь, уравнение которой имеет вид ![]() , является голономной и стационарной. Для голономной нестационарной связи уравнение будет таким:
, является голономной и стационарной. Для голономной нестационарной связи уравнение будет таким: ![]() .
.
Например, жесткий стержень длиной l, прикрепленный к неподвижной опоре, является стационарной связью для материальной точки, находящейся на его свободном конце. Уравнение связи в декартовой системе координат, начало которой совпадает с точкой закрепления стержня, имеет вид ![]() .
.
(При вращении стержня вокруг опоры точка находится на сфере радиусом l.) Если длина стержня изменяется по заданному закону, то связь является нестационарной и ее уравнение ![]() .
.
Связь называется удерживающей (двухсторонней), если она описывается уравнением (равенством). Голономную стационарную удерживающую связь, наложенную на материальную точку, можно представить в виде двух бесконечно близких одинаковых поверхностей, между которыми только и может находиться точка. Неудерживающая (односторонняя) связь описывается неравенством. Например, если математический маятник представляет собой тонкий стержень длиной l, вращающийся вокруг неподвижной оси и к свободному концу которого прикреплен груз (материальная точка), то связь для груза будет удерживающая. Если же груз прикреплен к свободному концу нерастяжимой нити длиной l. то связь будет неудерживающая, поскольку груз может находиться как на поверхности сферы радиусом l, так и внутри нее.
Из лекций:
Связи - условия, ограничивающие свободу перемещения материальной точки.
f(x,y,z,x·,y·,z·,x··,y··,z··,t)=0
Классификация связей:
1) Геометрические связи.
f(xK,yK,zK,t)=0
2) Кинематические связи.
f(xK,yK,zK,x·K,y·K,z·K,t)=0
a) интегрируемые; (геометрические, интегрируемые кинематические = голономные)
б) неинтегрируемые; (геометрические, неинтегрируемые кинематические = неголономные)
Пример:
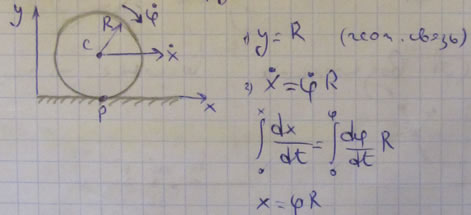
3) Стационарная связь (склерономная).
f(xK,yK,zK,x·K,y·K,z·K)=0
Если t входит в уравнение явным образом, то связь нестационарная (реономная).
4) Освобождающие и неосвобождающие связи.
(неосвобождающая связь) ; (освобождающая связь)
x2+y2+z2=l2 ; x2+y2+z2<=l2
5) Идеальные и реальные связи.
Возможная работа - элементраная работа силы на возможном перемещении.
dA=Fdr - элементарная работа силы (F и r - векторы)
Для системы:
![]()
Если у какой-то связи ![]() (RK тоже вектор), то связь называется идеальной.
(RK тоже вектор), то связь называется идеальной.
Если вся сумма ![]() , то механическая система с идеальными связями.
, то механическая система с идеальными связями.
Реальные связи: ![]() .
.
Примеры идеальных связей: внутренние связи в абсолютно твердых телах; абсолютно гладкие поверхности; шарниры без трения; нерастяжимые нити; закрепленные точки; качение без скольжения.
Примеры реальных связей: шероховатая поверхность; шарниры с трением; упругие растяжимые нити; пружины; качение с проскальзыванием.
Замечание: всякую реальную связь можно сделать идеальной.