где П — потенциальная энергия системы.
Устойчивость положения равновесия механической системы. Теорема Лагранжа-Дирихле.
Рассмотрим механическую систему с голономными, стационарными и неосвобождающими связями с n степенями свободы, движение которой определяется обобщенными координатами q1, q2, .., qn.
В соответствии с принципом возможных перемещений в положении равновесия все обобщенные силы равны нулю: Q1=0, .., Qn=0.
Для консервативной системы эти условия принимают вид:
![]() (19.1)
(19.1)
где П — потенциальная энергия системы.
Поскольку П есть П(q1, q2, .., qn), (19.1) можно рассматривать как систему уравнений относительно обобщенных координат, представляющих собой условия экстремума потенциальной энергии. Решая их можно найти положения, в которых система будет находиться в равновесии.
Однако положение равновесия может быть устойчивым, неустойчивым и безразличным.
Если существует такое достаточно малое отклонение системы от положения равновесия, при котором она стремится вернуться назад, то такое положение равновесия будет устойчивым. В случае, когда при любом начальном отклонении система удаляется от положения равновесия, положение равновесия будет неустойчивым. Если же при начальном отклонении система остается в отклоненном положении, то положение равновесия будет безразличным.
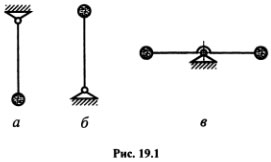
На рис. 19.1 представлены устойчивое (см. рис. 19.1, а) и неустойчивое (см. рис. 19.1, б) положения равновесия математического маятника. Безразличное положение равновесия имеет система, приведенная на рис. 19.1, в.
При устойчивом положении равновесия система после достаточно малого начального возмущения совершает колебания около положения равновесия или возвращается в это положение без колебаний. При неустойчивом положении равновесия система после любого начального возмущения при дальнейшем движении все более удаляется от положения равновесия.
Строгое определение понятия устойчивости положения равновесия было дано в конце XIX в. А. М. Ляпуновым. Условимся отсчитывать обобщенные координаты q1, q2, .., qn от положения равновесия, т.е. считать их в положении равновесия равными нулю. Выведем систему из положения равновесия, сообщив обобщенным координатам в начальный момент времени возмущения (отклонения q10, q20, .., qn0, и скорости ![]() ). Обозначим обобщенные координаты и их скорости при дальнейшем движении через
). Обозначим обобщенные координаты и их скорости при дальнейшем движении через ![]() соответственно.
соответственно.
По Ляпунову, равновесие системы называется устойчивым, если для любых сколь угодно малых положительных чисел ![]() можно выбрать 2n других таких положительных чисел
можно выбрать 2n других таких положительных чисел ![]() что при начальных возмущениях системы, удовлетворяющих условиям
что при начальных возмущениях системы, удовлетворяющих условиям ![]() ,
при дальнейшем движении системы будут выполняться неравенства
,
при дальнейшем движении системы будут выполняться неравенства ![]() .
.
В противном случае равновесие будет неустойчивым. Безразличное положение равновесия в соответствии с данным определением относится к неустойчивым, поскольку при наличии начальной скорости система будет удаляться от начального положения.
Если при устойчивом положении равновесия все обобщенные координаты и скорости с течением времени стремятся к нулю: ![]() , то рассматриваемое положение равновесия называется асимптотически устойчивым.
, то рассматриваемое положение равновесия называется асимптотически устойчивым.
Достаточное условие устойчивости положения равновесия консервативной системы определяется теоремой Лагранжа: достаточным условием устойчивости положения равновесия консервативной системы является наличие в нем локального (изолированного) минимума потенциальной энергии.
Однако в реальной механической системе всегда существуют силы сопротивления движению, возникающие благодаря трению или вязкости среды. Такие силы Кельвином названы диссипативными.
При наличии в системе диссипативных сил для оценки устойчивости положения равновесия можно дополнительно воспользоваться тремя теоремами Кельвина.
1. Если положение равновесия консервативной системы устойчиво при одних только потенциальных силах, то оно будет оставаться устойчивым и при добавлении диссипативных сил.
2. Устойчивое положение равновесия становится асимптотически устойчивым при добавлении диссипативных сил с полной диссипацией.
3. Изолированное и неустойчивое при одних потенциальных силах положение равновесия не может быть стабилизировано диссипативными силами.
Доказательства этих теорем могут быть получены как следствие теоремы Ляпунова об устойчивости движения, выходящей за рамки данного курса.
Первые две теоремы Кельвина указывают на то, что диссипативные силы не могут нарушить устойчивость положения равновесия, а третья — что диссипативные силы не в состоянии трансформировать неустойчивое положение равновесия консервативной системы в устойчивое. Следовательно, для оценки устойчивости положения равновесия реальную колебательную систему с диссипативными силами можно заменить ее консервативной моделью.
Из лекций:


Теорема Лагранжа-Дирихле (критерий устойчивости поожения равновесия механической системы): Для устойчивости положения равновесия механической системы подчиненной галономным, стационарным, идеальным или неосвобождающим связям и находящихся в стационарном силовом поле, достаточно, чтобы потенциальная энергия в положении равновесия имела изолированный относительный минимум.

Силы трения приводят к рассеиванию механической энергии. Сили трения - диссипативные.
Влияние диссипативных сил на устойчивость положения равновесия.
Первая теорема Кельвина: Наличие диссипативных сил не нарушает устойчивости положения равновесия (система будет перемещаться до тех пор пока не уравновесится).
Вторая теорема Кельвина: Добавление диссипативных сил увеличивает устойчивость положения равновесия.
Третья теорема Кельвина: Никакими диссипативными силами нельзя превратить неустойчивое положение в устойчивое.