Билет 14
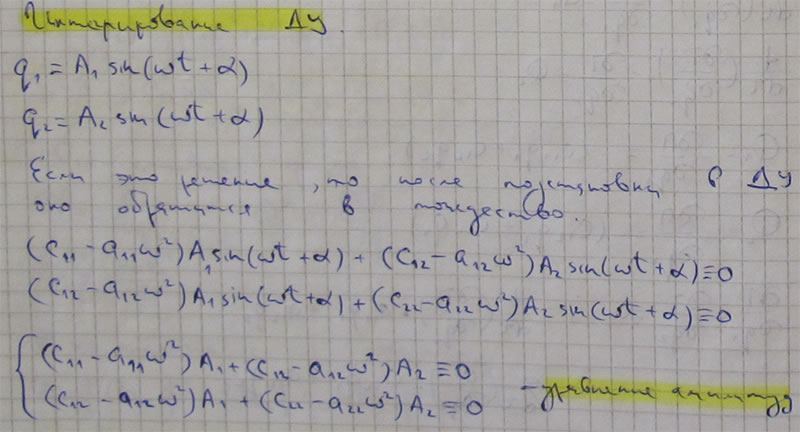
1) Интегрирование дифференциальных уравнений малых колебаний системы с двумя степенями свободы. Уравнение частот.
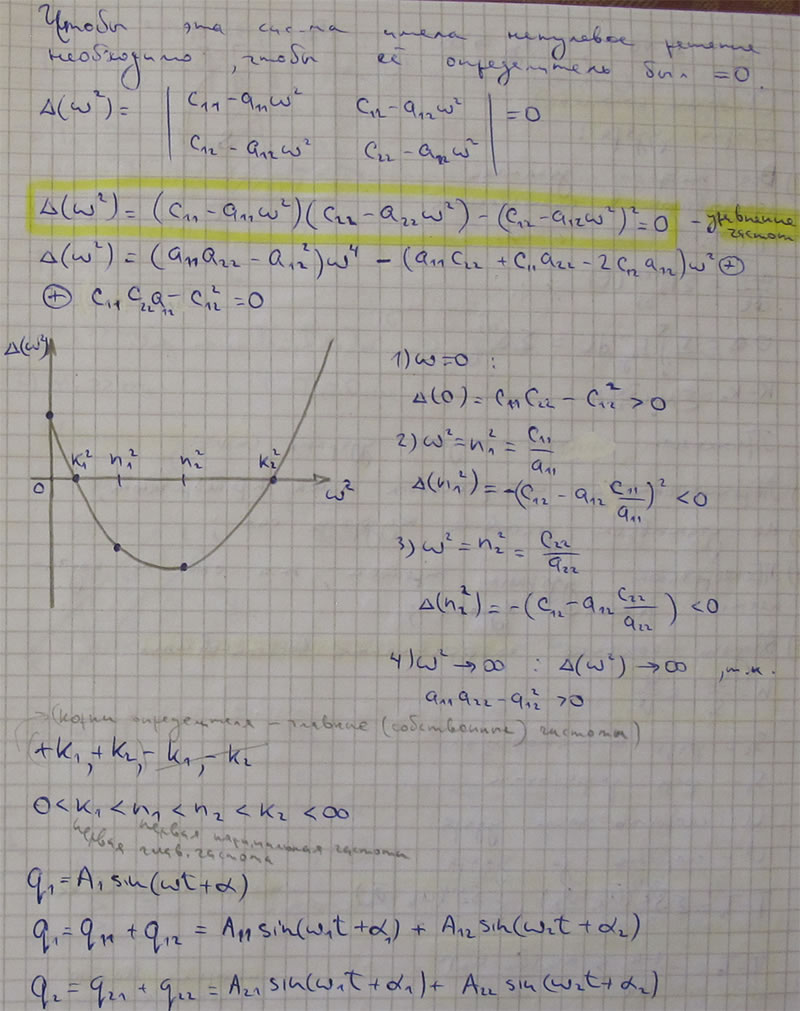
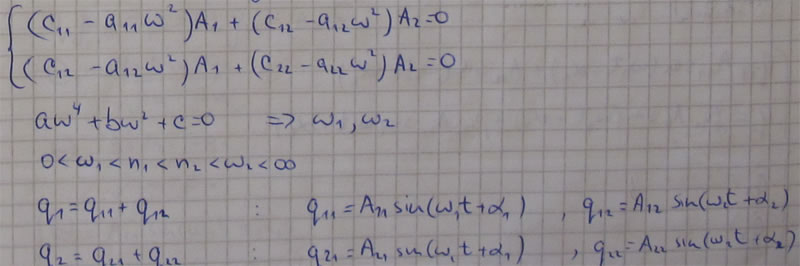
(очень подробно по учебнику 31. Интегрирование дифференциальных уравнений свободных колебаний в консервативной системе с двумя степенями свободы. Уравнение частот, исследование его корней.)
2) Принцип возможных перемещений.
Принцип возможных перемещений (Лагранжа): Для равновесия механической системы, подчиненной голономным, идеальным, стационарным и неосвобождающим связям, необходимо и достаточно, чтобы сумма элементарных работ всех активных сил приложенных к точкам системы была равна нулю на любом возможном перемещении.

или в декартовых координатах:
 .
.
Положение равновесия - такое положение механической системы, в котором она может находиться сколь угодно долго, если в начальный момент времени система была приведена в это положение с нулевыми скоростями.
Голономная связь - механическая связь, налагающая ограничения только на положения (или перемещения) точек и тел системы.
Идеальная связь - связь у которой ![]() .
.
Связи подразделяются на стационарные и нестационарные в зависимости от того, входит в явном виде время в уравнение связи или нет. Связь, уравнение которой имеет вид ![]() , является голономной и стационарной. Для голономной нестационарной связи уравнение будет таким:
, является голономной и стационарной. Для голономной нестационарной связи уравнение будет таким: ![]() .
.
Возможное перемещение - такое бесконечно малое (элементарное) мысленное перемещение, которое допускается, в рассматриваемый момент времени, связями наложенными на точку.
Элементарная работа - возможная работа силы на возможном перемещении.
Докажем необходимость принципа возможных перемещений:
![]() , k=1..N
, k=1..N
![]() , k=1..N
, k=1..N
![]()
![]() для идеальных связей, следовательно:
для идеальных связей, следовательно:
![]()
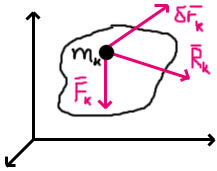
Докажем достаточность методом от противного:
Предположим, что одна из точек находится не в равновесии.
![]()
![]()
![]()
![]()
![]() , но
, но ![]() , что противоречит условию.
, что противоречит условию.