Билет 26
1) Малые движения системы с линейным сопротивлением. Затухающее неколебательное движение.
Колебательное движение механической системы - такое движени, при котором все ее обобщенные координаты или хотя бы одна из них изменяется с неоднократным возрастанием и убыванием.
Малые колебания - колебания, при которых возвращающая сила, действующая на тело, пропорциональна его отклонению от состояния равновесия, или проще: тип движения механических систем вблизи своего положения устойчивого равновесия.
Устойчивое равновесие - равновесие, при котором малое возмущение системы приводит к ее малому отклонению от состояния равновесия.
Равновесие тела устойчиво:
- если его потенциальная энергия имеет минимальное значение;
- если центр тяжести тела занимает наинизшее положение по сравнению со всеми возможными соседними положениями.
Дифференциальное уравнение малых движений системы с линейным сопротивлением имеет вид:
![]() ,
,
где ![]() - коэффициент затухания;
- коэффициент затухания; ![]() - круговая или циклическая частота.
- круговая или циклическая частота.
а - обобщенный коэффициент инерции; b - обобщенный коэффициент сопротивления; с - обобщенный коэффициент жесткости.
Характерестическое уравнение:
![]() .
.
Корни характерестического уравнения:
![]() .
.
Характер движения системы будет существенно зависеть от соотношения между величинами ![]() и
и ![]() . Возможны три случая:
. Возможны три случая:
1) ![]() <
<![]() - случай малого сопротивления, уравнение имеет комплексно-сопряженные корни;
- случай малого сопротивления, уравнение имеет комплексно-сопряженные корни;
2) ![]() =
=![]() - случай критического сопротивления (резонанс), уравнение имеет кратные корни;
- случай критического сопротивления (резонанс), уравнение имеет кратные корни;
3) ![]() >
>![]() - случай большого сопротивления, уравнение имеет два вещественных отрицательных корня.
- случай большого сопротивления, уравнение имеет два вещественных отрицательных корня.
Затухающее неколебательное движение мы имеем в случае критического сопротивления (![]() =
=![]() ) и в случае большого сопротивления (
) и в случае большого сопротивления (![]() >
>![]() ).
).
Рассмотрим случай ![]() =
=![]() .
.
![]()
При кратных корнях общее решение дифференциального уравнения имеет вид:
![]() .
.
При начальных условиях t=0 q=q0, ![]() :
:
C1=q0; ![]() .
.
Решение ДУ может обратиться в ноль только один раз, если константы C1 и C1 разные знаки. Для этого начальное отклонение и начальная скорость должны иметь разные знаки, и при этом необходимо выполнение условия ![]() .
.

Видно, что движение не имеет колебательного характера и отсутствуют какие-либо признаки периодичности. Такое движение называют апериодическим, а с учетом рассмотрения критического сопротивления - предельно апериодическим.
Теперь рассмотрим случай большого сопротивления (![]() >
>![]() ).
).
![]() ,
,
где ![]() .
.
Поскольку k<![]() , оба корня характеристического уравнения будут отрицательными.
, оба корня характеристического уравнения будут отрицательными.
Общее решение ДУ в этом случае будет иметь вид:
![]() .
.
При начальных условиях t=0 q=q0, ![]() :
:
![]() ;
; ![]() .
.
В этом случае движение также имеет апериодический характер, аналогичный представленному на рисунке выше, но с увеличением ![]() графики растягиваются вдоль оси абсцисс, поскольку с возрастанием вязкого сопротивления при прочих равных условиях скорость движения убывает.
графики растягиваются вдоль оси абсцисс, поскольку с возрастанием вязкого сопротивления при прочих равных условиях скорость движения убывает.
2) Принцип возможных перемещений.
Принцип возможных перемещений (Лагранжа): Для равновесия механической системы, подчиненной голономным, идеальным, стационарным и неосвобождающим связям, необходимо и достаточно, чтобы сумма элементарных работ всех активных сил приложенных к точкам системы была равна нулю на любом возможном перемещении.

или в декартовых координатах:
 .
.
Положение равновесия - такое положение механической системы, в котором она может находиться сколь угодно долго, если в начальный момент времени система была приведена в это положение с нулевыми скоростями.
Голономная связь - механическая связь, налагающая ограничения только на положения (или перемещения) точек и тел системы.
Идеальная связь - связь у которой ![]() .
.
Связи подразделяются на стационарные и нестационарные в зависимости от того, входит в явном виде время в уравнение связи или нет. Связь, уравнение которой имеет вид ![]() , является голономной и стационарной. Для голономной нестационарной связи уравнение будет таким:
, является голономной и стационарной. Для голономной нестационарной связи уравнение будет таким: ![]() .
.
Возможное перемещение - такое бесконечно малое (элементарное) мысленное перемещение, которое допускается, в рассматриваемый момент времени, связями наложенными на точку.
Элементарная работа - возможная работа силы на возможном перемещении.
Докажем необходимость принципа возможных перемещений:
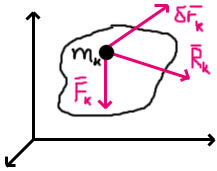
![]() , k=1..N
, k=1..N
![]() , k=1..N
, k=1..N
![]()
![]() для идеальных связей, следовательно:
для идеальных связей, следовательно:
![]()
Докажем достаточность методом от противного:
Предположим, что одна из точек находится не в равновесии.
![]()
![]()
![]()
![]()
![]() , но
, но ![]() , что противоречит условию.
, что противоречит условию.